Nano-swarm robots developed by scientists at the Hong Kong University
Led by Associate Professor Li Zhang, a team of scientists from the Chinese University of Hong Kong designed and implemented a strategy of using oscillating magnetic fields to create highly reconfigurable ribbon-like swarms of nano-robots
As reported in their paper recently published in Nature:
[...] creating a swarming robotic system at the microscale that embodies functional collective behaviours remains a challenge. Herein, we report a strategy to reconfigure paramagnetic nanoparticles into ribbon-like swarms using oscillating magnetic fields, and the mechanisms are analysed. By tuning the input fields, the microswarm can perform a reversible elongation with an extremely high aspect ratio, as well as splitting and merging.
The group of scientists led by Professor Li Zhang, at the Chinese University of Hong Kong, has developed a new method of controlling nano-robots that emulates natural swarm behavior. The micro-swarm of nano-robots is capable of performing a wide range of structural changes, including extending, shrinking, splitting, and merging, all with a high degree of accuracy.
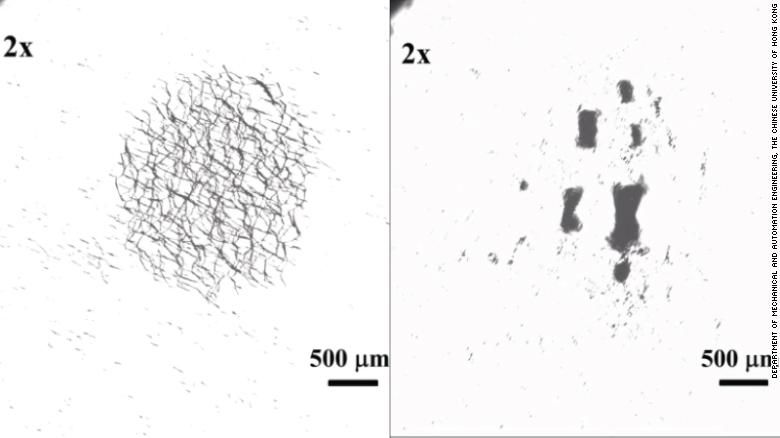
The micro swarm is composed by millions of magnetic nano-particles each less than one micron wide, or one-fifth the length of a red blood cell. The following video published here, shows the swam in action.
The mobile microswarm is capable of performing reversible anisotropic deformation with its aspect ratio changing over one order of magnitude, as well as the controlled splitting and merging. The technique provides insights into the generation, reconfiguration and navigated locomotion of a microswarm. Our work provides support to understand the swarm behaviour at small scales and the corresponding control methods from several aspects.
The creepy part is that the scientists want their creations to be ready to deal with future outbreaks of lethal viruses.
References: